
Here are the close shot for all APEC 2013 micromouse pictures. There are something very interesting behind these mice and their designers, I will talk about this next time.

overview
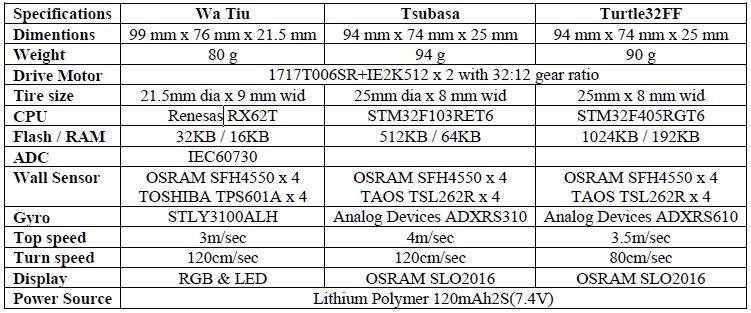
![]() turtle32FF
turtle32FF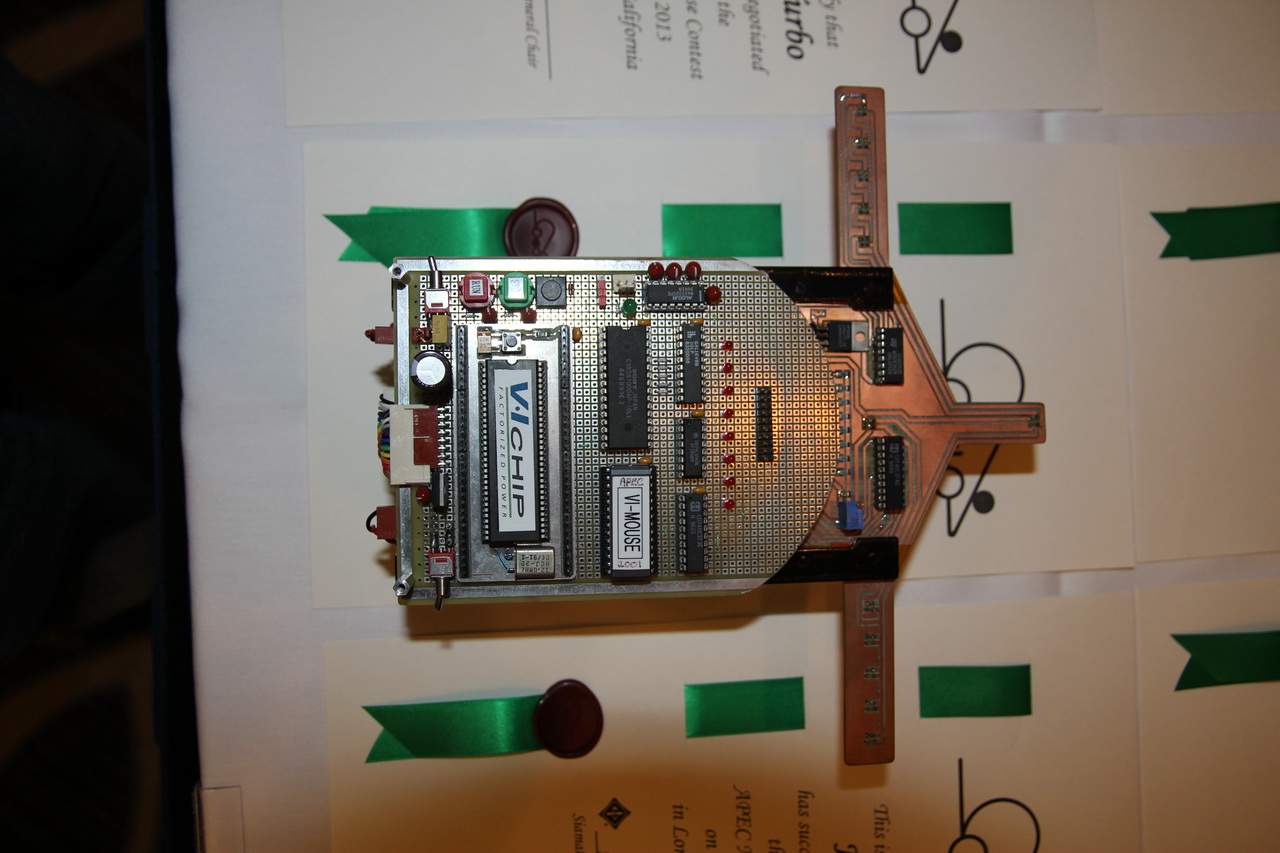
VI Mouse
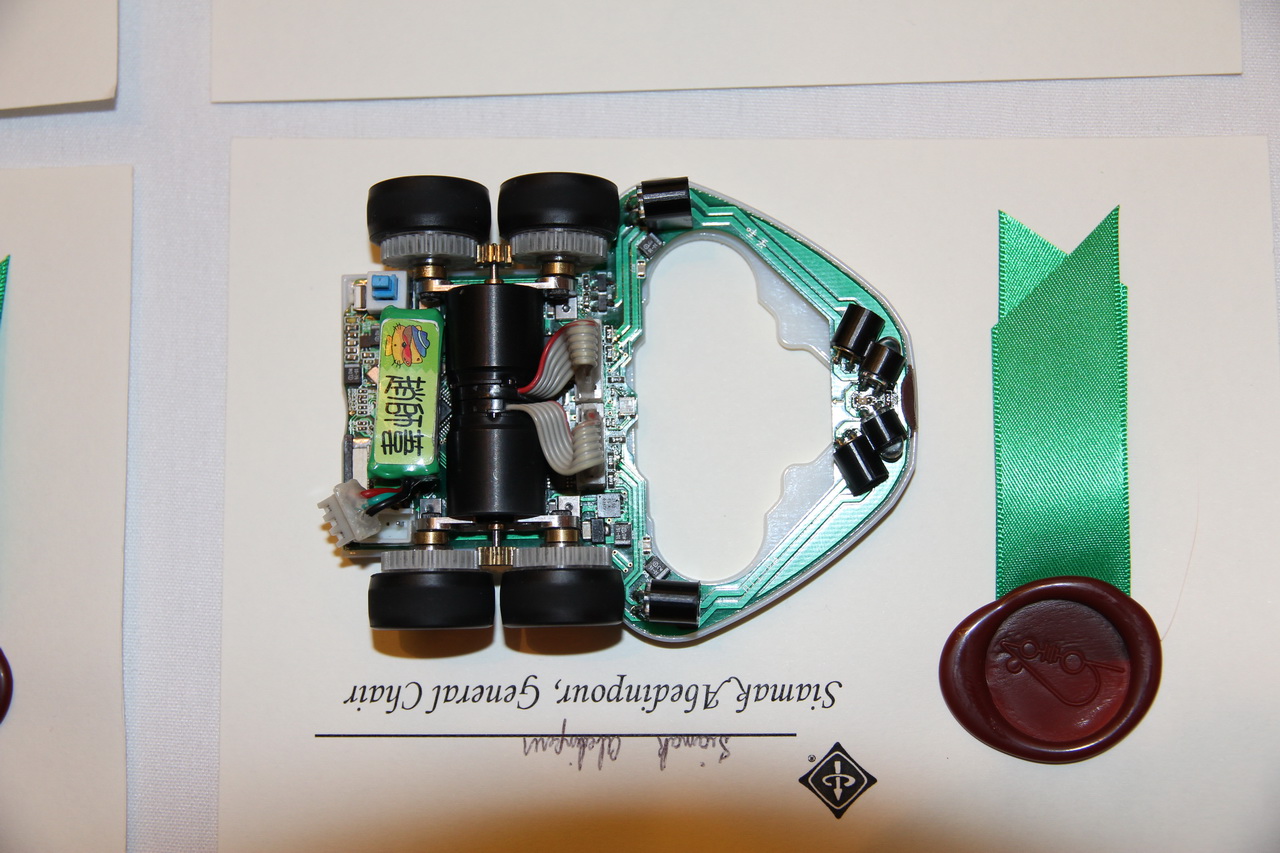
Wa-Tiu
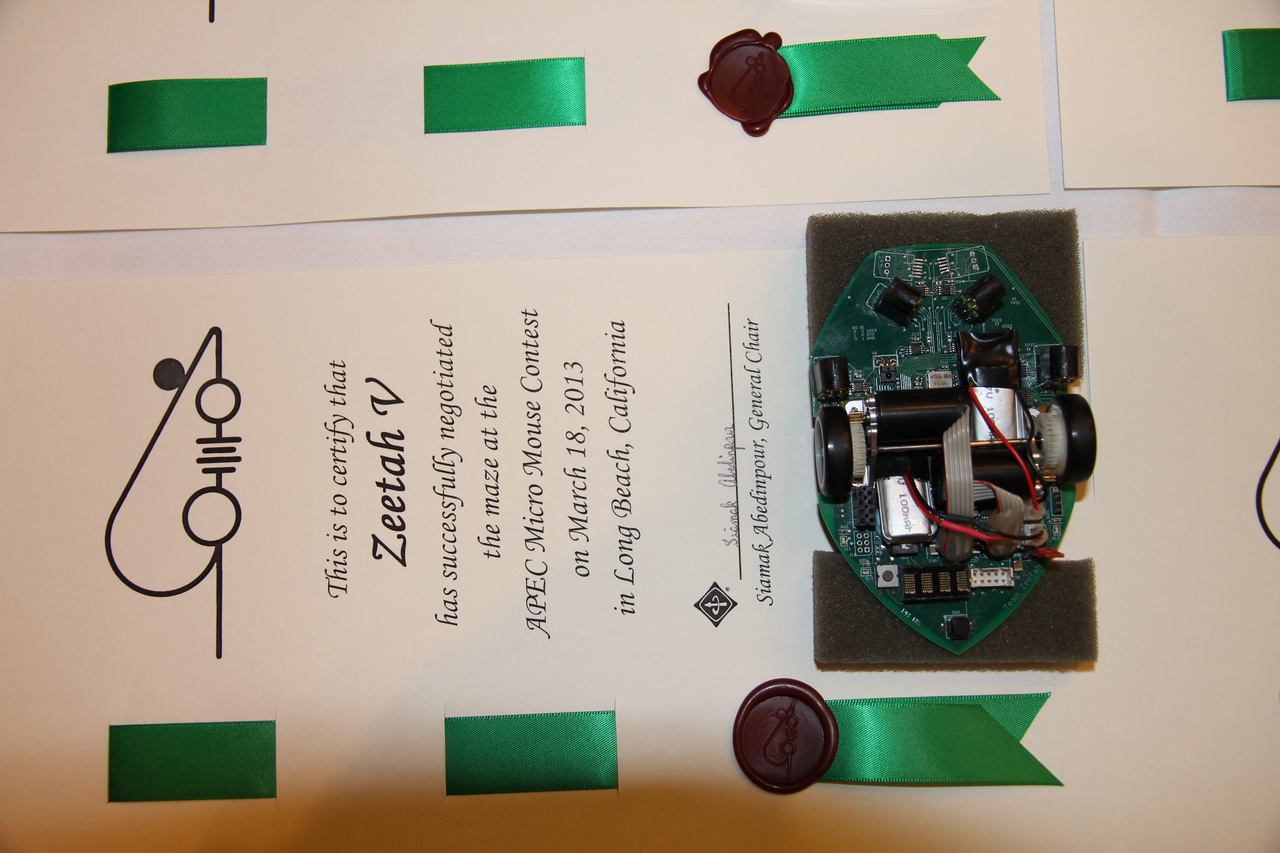 Zeetab V
Zeetab V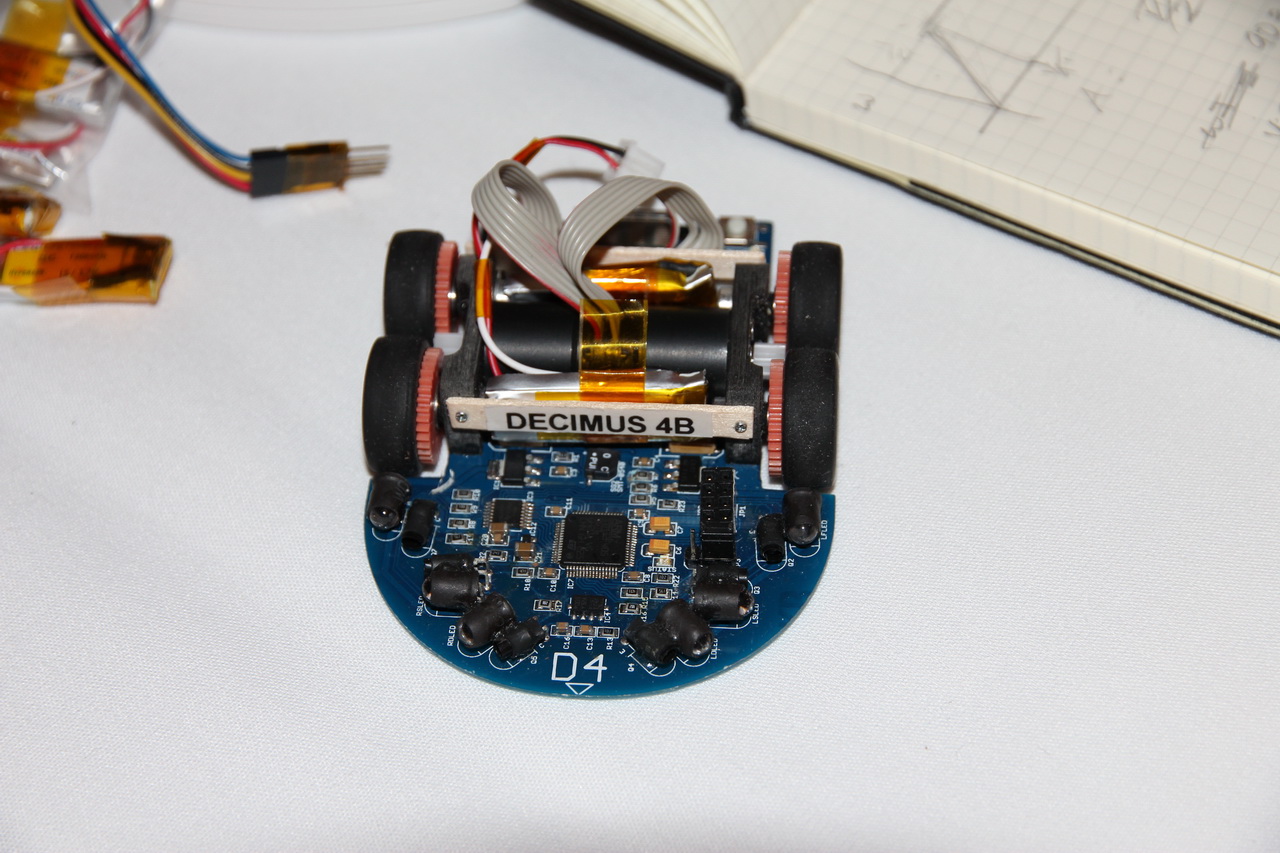
Decimus 4
 excel-8A
excel-8A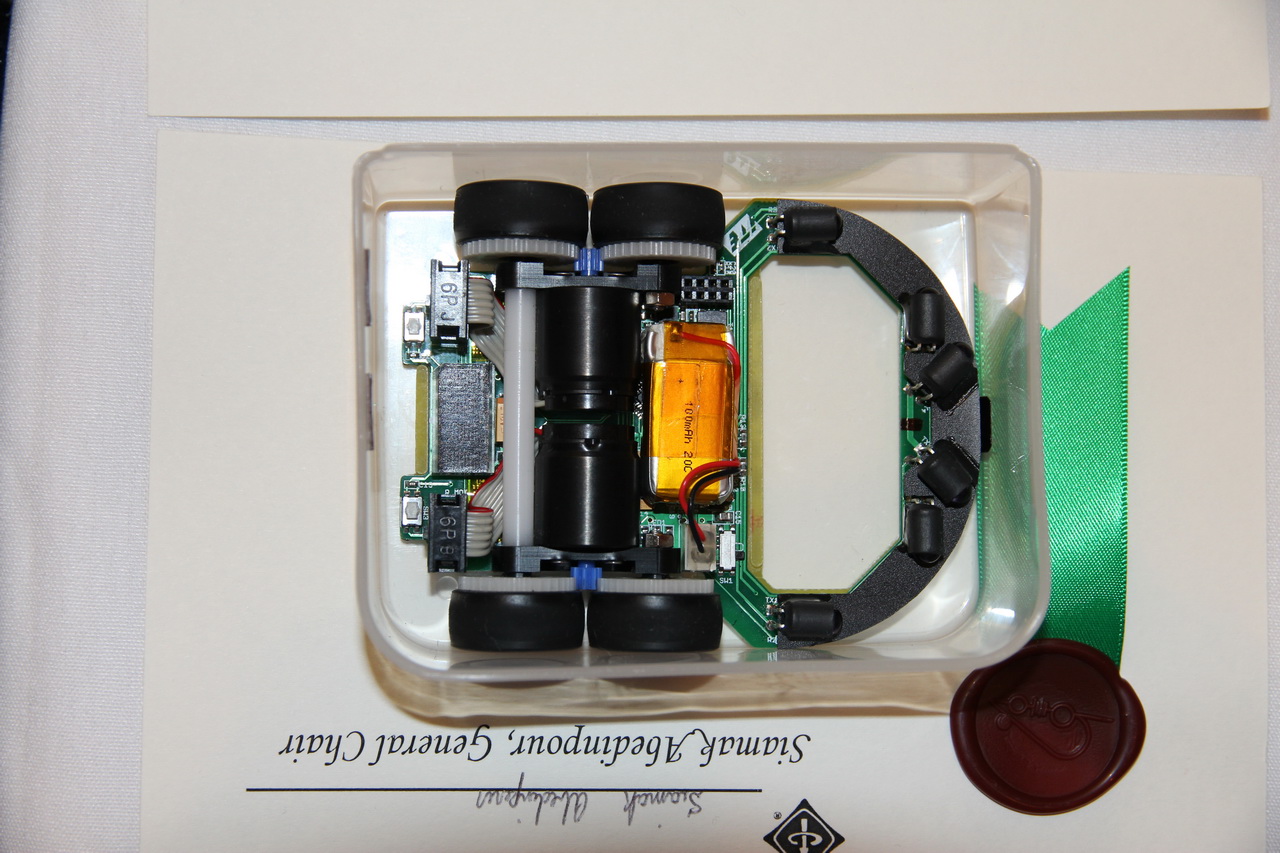
excel-8B
 FAB 1
FAB 1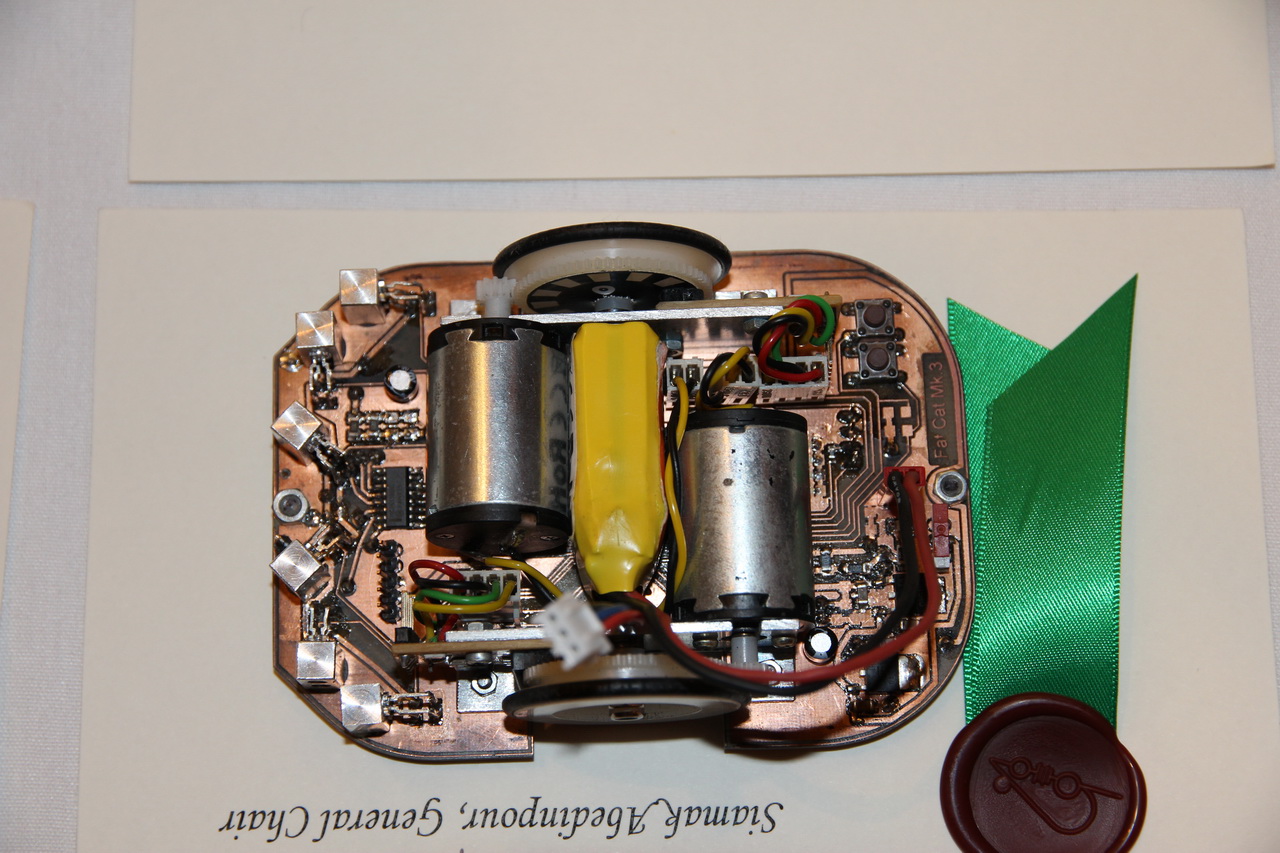
Fat cat 3
 Green Giant V2.2
Green Giant V2.2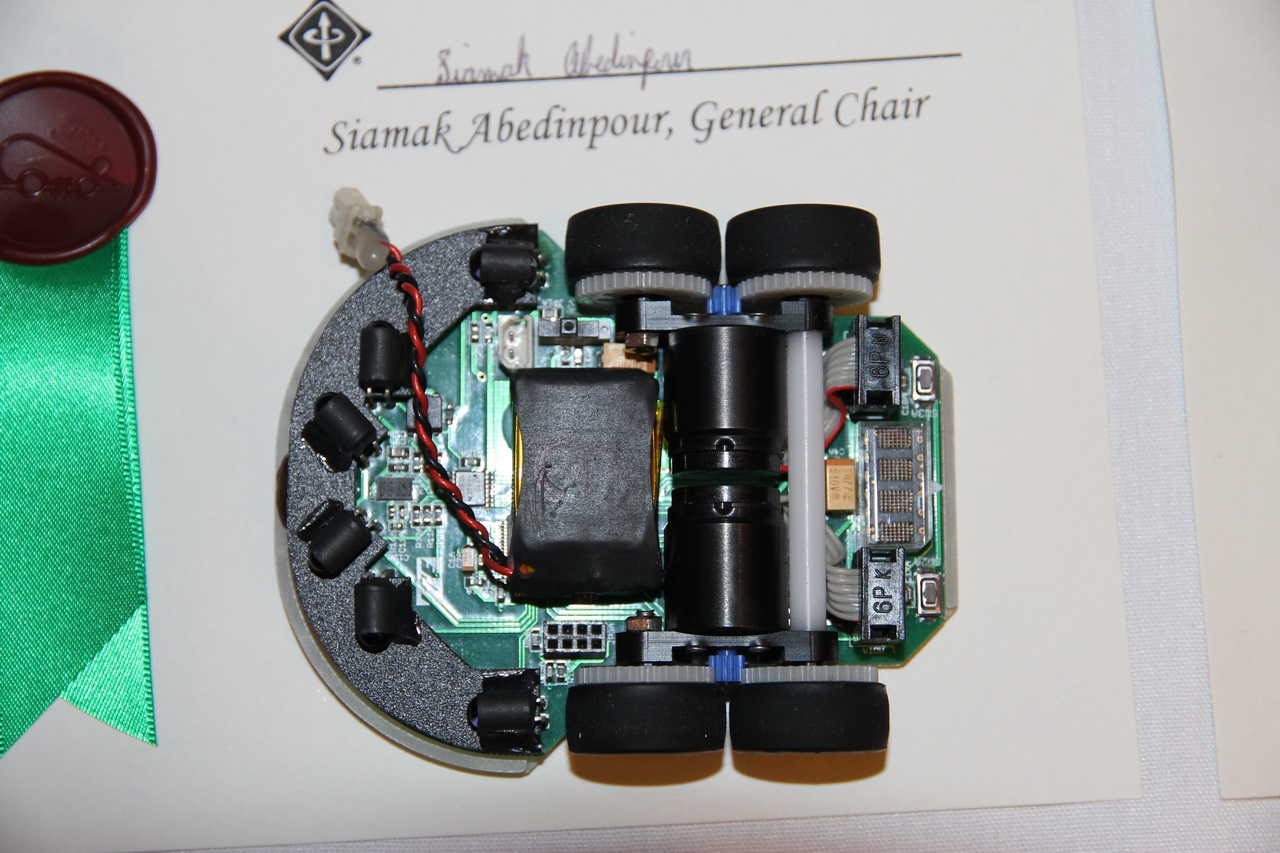
Hulk 1 & Hulk 2 (they are exactly same)

Kaasjager
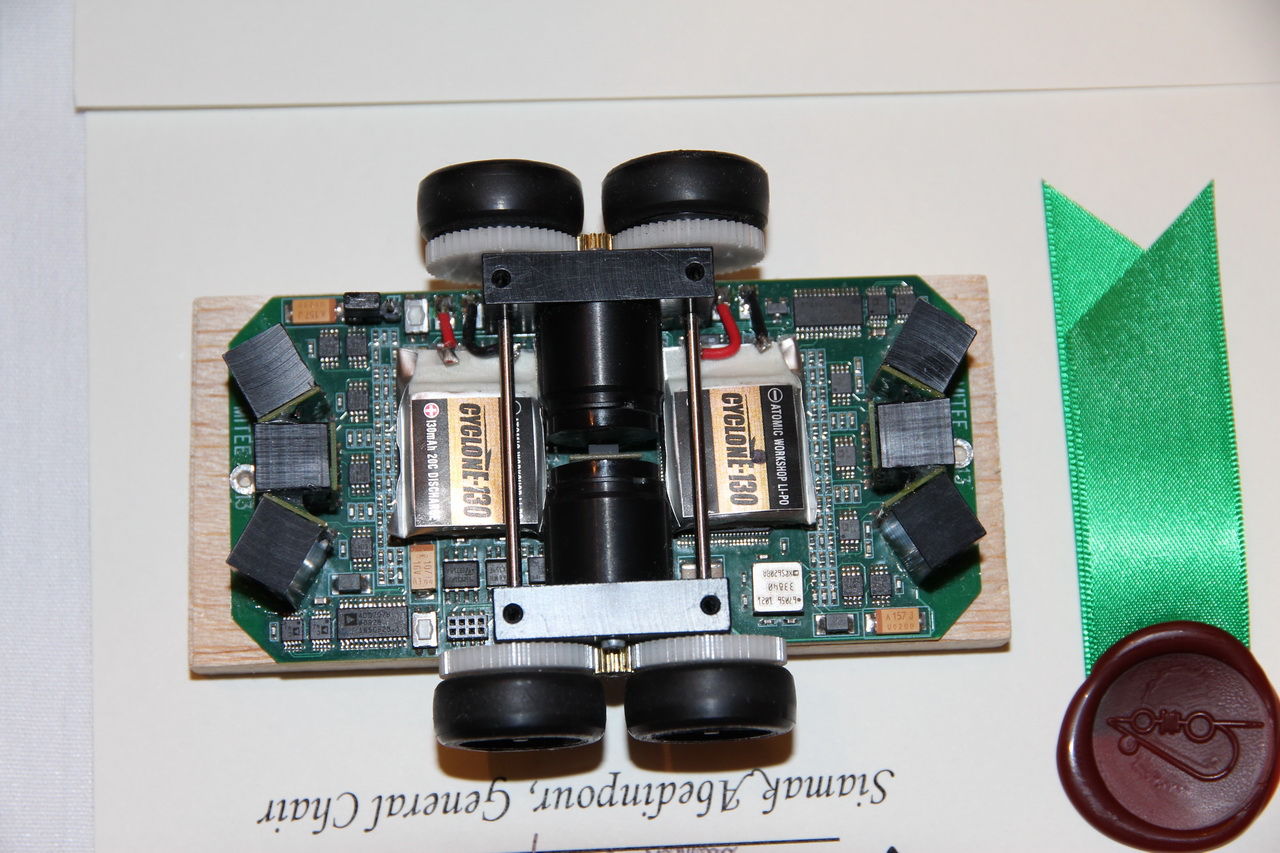
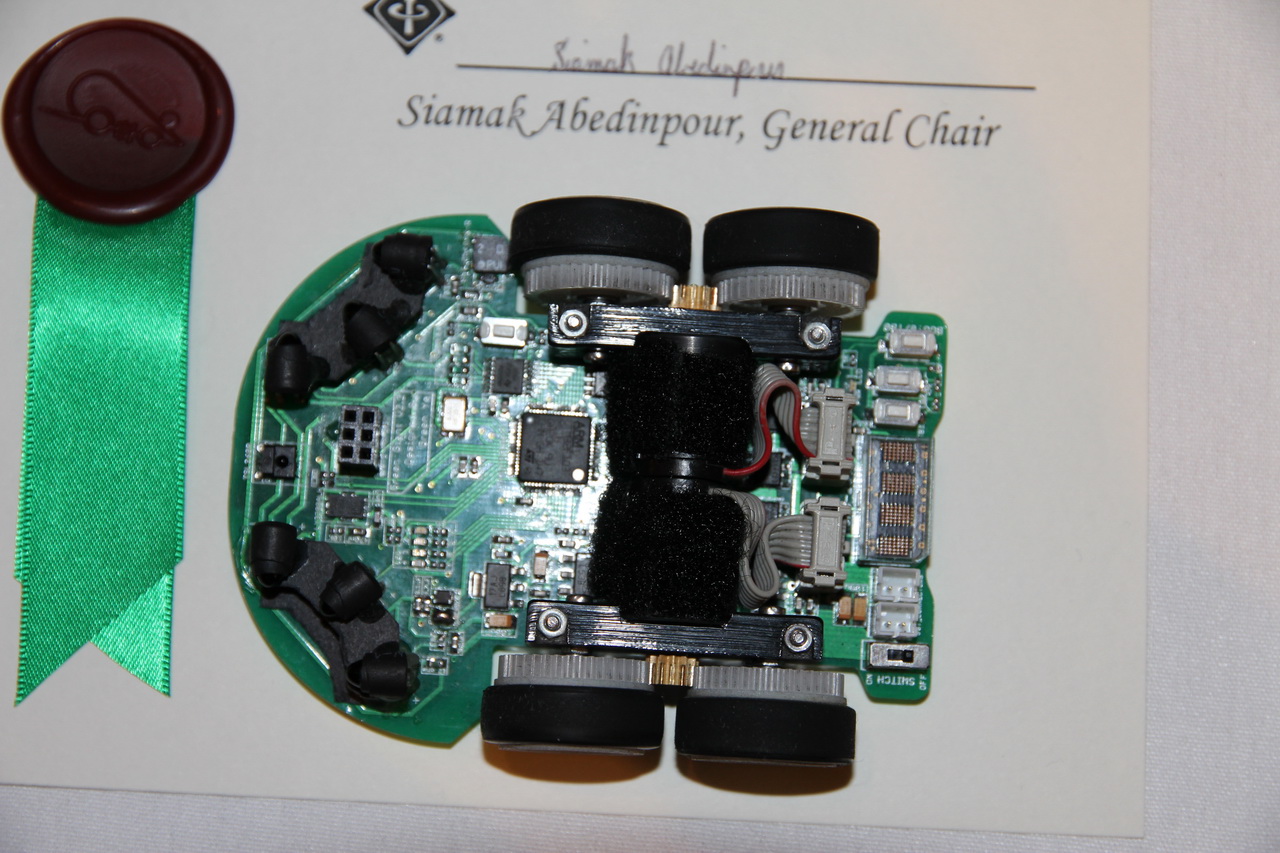
MITEE 13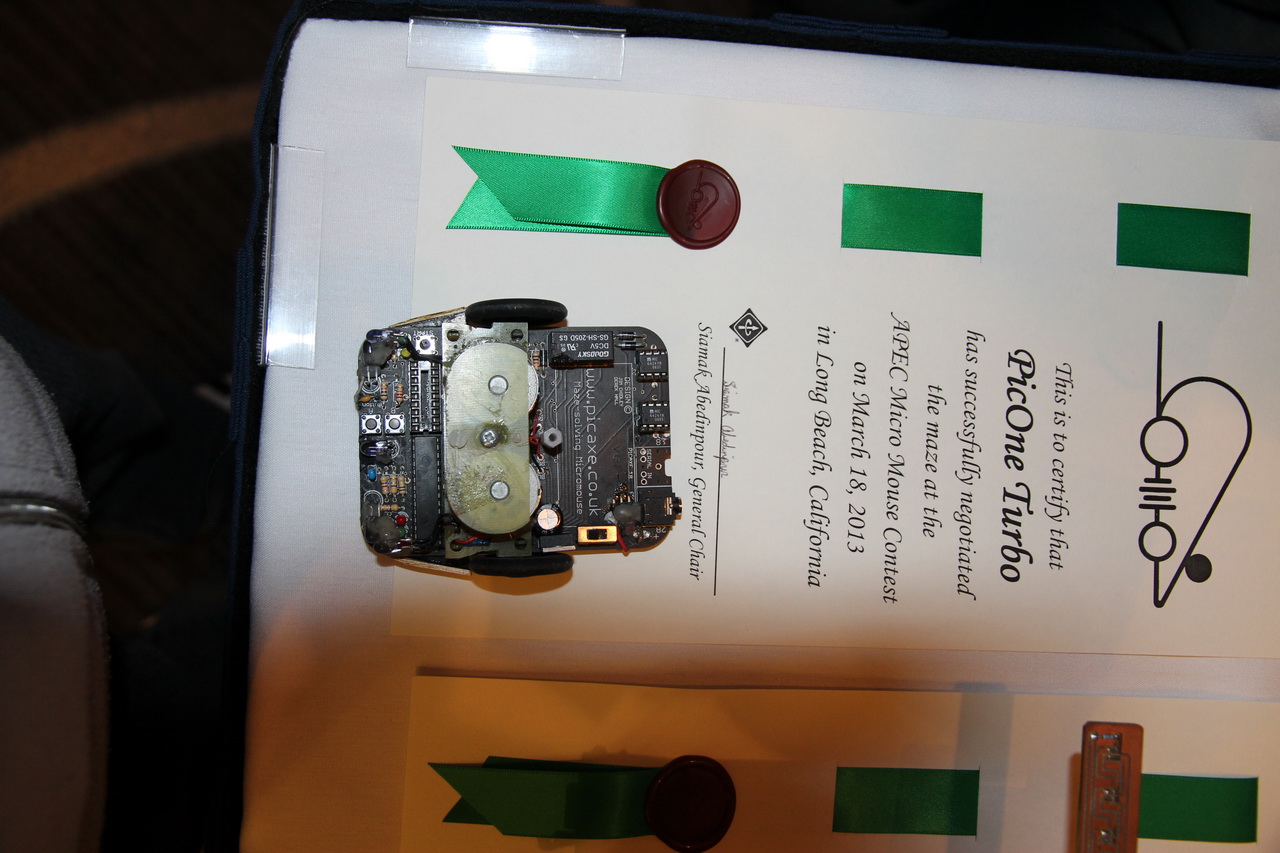
PicOne Turbo
Here are the brief introduction of all mice
Pic One Turbo, Mouse X, and FAB 1 are designed and built by Derek Hall and Jim Chidley of the UK. PicOne Turbo is a modified PicOne Micromouse Kit. Their original concept was to promote awareness for micromouse throughout schools and colleges with a simple to build, low cost kit. It uses a PICAXE 28X2 with 512 bytes of RAM. This is a Microchip 18 series
PIC with a built in basic interpreter. It is driven by two low cost 6V motors, has three TSL262R sensors to detect the walls, and two phototransistor wheel counters. It is programmed in Basic and runs without any interrupts. Mouse X uses an 8051 processor running at 32 MHZ with 1K of RAM. It has 6TSL262R sensors and 500mAh LiPo batteries. The total weight is 220g (heavy for a micromouse). It won its first UK champion title back in 2006 and has since undergone considerable software modification allowing it to maintain its high ranking in Europe. FAB 1 parodies the Thunderbird’s pink Rolls Royce. It uses a STM32 processor running at 72 MHZ with 96k of RAM. It has 6 TSL262R sensors and 100mAh LiPo batteries. The total weight of 100g is driven by six powered wheels, allowing the mouse to accelerate and decelerate at much higher rates. The two center wheels are mounted 0.5mm lower than the others, allowing uncompromised high speed cornering.
VI-Mouse is once again participating in the APEC Micromouse competition. Previously it competed at APEC’01, ’02, ’04, ’07, and ‘12. VI-Mouse uses two bipolar stepper motors, twelve infra-red sensors, and is powered by 18 new NiCd cells. Mr. Gim Soon Wan has been working as a design engineer at Vicor Corporation since he graduated from Merrimack College.
Hulk-1 & Hulk-2 was designed and developed two years ago by staff and students at the Institute of Technical Education in Singapore. The main feature of this micromouse is the 4-wheel design which is capable of accelerating at more than 10m/s2 and able to turn accurately. The center gravity of this micromouse is slightly further away from the center of the motor because the battery (one of the heavy component) is right at the front of the motor.
Kaasjager was designed and built by Coen Roos, a retired employee since 2001 of the ‘Netherlands Organization of Applied Scientific Research’ TNO in Delft where he was involved in electronics design and instrumentation since 1970. He says he started the project in “2006 with little or no knowledge of the critical areas of the envisaged project”. The high level maze solving functions of his entry are performed in an Atmel Atmega32 microprocessor programmed in C++ while the low level motor control functions in a PIC16F870 are programmed in assembly. Low cost motors are used with a single 400 mAh cell for power. Part of the external gear reduction is a 1 quadrant encoder (no turn direction) using a slotted opto and a gear with increased tooth depth providing a resolution of ~ 1 mm. Three infra-red sensors are used to measure the relative distance to the left, right, and front walls. The mouse measures 105 mm(L) x 66 mm(W) x and 88 mm(H) with a mass of 280 grams
Turtle32FF, Tsubasa, and Wa Tiu are designed and built by students of the Lunghwa University of Science and Technology in Taiwan.
The BatMouse is a senior design project of a team of four electrical engineering students at CSULA. Two of the students had micromouse experience from the year before and this is the schools first printed circuit board design. The intricate components (processor, encoders, motor driver, and gyro) are on pre-manufactured breakout boards that are attached using terminal blocks in order to save on scheduling time. The mouse’s maze solving algorithm is derived from one created last year and is capable of solving the maze. The current issue is finding bugs in the program that make the mouse lose count. Barring that, we can make it to the center in a few minutes if not less.
Decimus 4 is a new mouse by Peter Harrison from the UK. It will be getting its first public outing at APEC this year. Based heavily on the recently popular four-wheel designs, it should represent a significant step up in potential performance over previous mice. The use of 3D printed parts has greatly simplified the mechanical design and construction of this mouse. During preliminary testing, Decimus 4 has demonstrated repeatable turns at more than 1g of centripetal acceleration and straight-line accelerations of up to 11m/s2. The ARM cortex M4 processor is an STM32F407 running at 72MHz. It performs all the navigation, solver and control functions using floating point throughout while still only taking up less than 10% of the available processor power.
Green Giant V2.2 was designed and built in one month by Green Ye, a student at UCLA. It uses 6 infrared sensor pairs, a gyro, and Fauhalber 1717 6V motors with IE2-512 encoders. An STM32F103RE works as its MCU. A 4 character alpha numeric LED display is used to help with debugging. A customized 7.4V 220 mAh 2s2p battery is used to power the entire system. The mouse measures 100 mm x 75 mm x 24.5 mm. It can achieve 3m/s max speed at about 11.5m/s2 when accelerating and decelerating. Curved turns may not be used during the competition since they are not yet perfected.
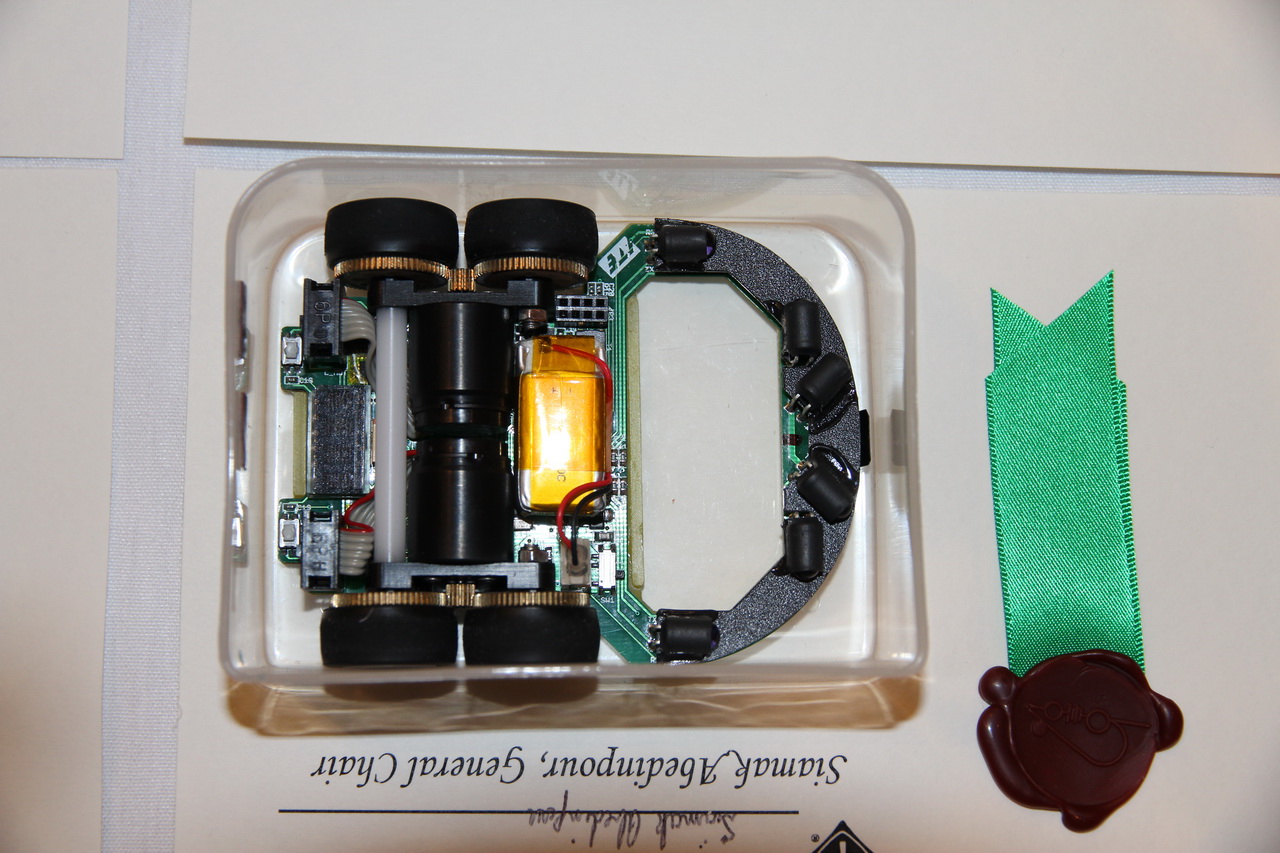
Zeetah V was designed and built by Harjit Singh and Pierre Hollis. It uses a STM32F103 CPU with 512KB flash and 64KB of RAM. It has four triangulation based sensors, the same technology as the MITEEx based mice as well as an ADXLRS610 gyro and KXSD9 tri-axis accelerometer. Also included are a beeper, a four character display for debugging, and 16MB of on-board serial flash for data logging. Power comes from two LiPo 100 mAh cells. The motors are MicroMo 1524T006SR with IE-512 encoders. The mouse measures 119 mm x 75 mm.
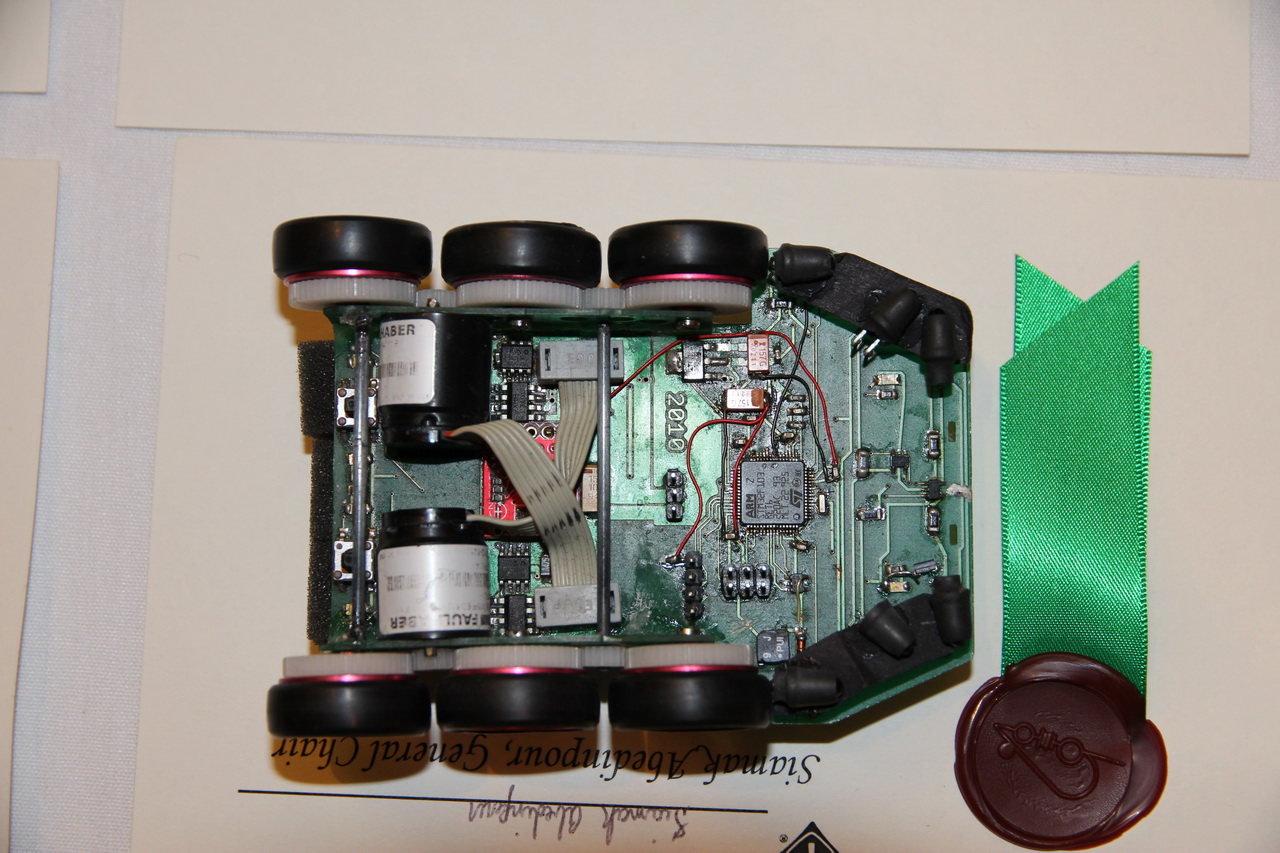
Excel-8a & Excel-8b were designed by staff at the Institute of Technical Education in Singapore. They were developed with ARM Cortex-M3 & M4 processors. The 4-wheel designs were inspired by Mr Kato and Mr Ng Beng Kiat’s 4-wheel entries from recent years. Indeed the 4-wheel designs have pushed performance to another limit where they are able to accelerate at more than 10m/s2 in a straight run and turn as fast as a 2-wheel micromouse.
MITEE Mouse 13 was designed and built by of David Otten, a staff member at the Massachusetts Institute of Technology. Unfortunately it came in next to last in the finals at the All-Japan Micromouse Contest last year.
Fat Cat 3 uses a dsPIC33EP256MU806 CPU with 256K Flash and 28K RAM, running at 64 MHz. It has six conventional IR emitters and IR phototransistors for wall sensing, at in pairs 0, 45 and 90 degrees. The MAXON A-Max 22×32 motors used were donated for free by Derek Hall. They are way too powerful (and way too heavy!), but they are much better motors than the cheap £1.50 ones I had on FC1. At its fastest it manages to accelerate at a maximum of about 5 m/s2, and can hit a top speed of almost 3 m/s. Power is provided by a single 360mAh Rhino LP battery (2S1P, 7.6V.) The wheels and axles were made on a Unimat 3 mini-lathe at home, and use o-rings for tires. The mouse uses home-brew encoders on the wheels to get approximately 0.3mm resolution on the ground. It is 110 mm long, 76 mm wide and weighs approx. 205 g.

{kind=link}
Hi, nice post. Hope to see more photos/videos soon!
I’m also trying to start developing new robots with new micro dsPIC33EP512MC806 or dsPIC33EP256MU806. I have previous experience with dsPIC30F4011 and XC16 MPLABX compiler. Do you think it is a good investment or is it preferably to go to Cortex M3/M4? In MPLAB I feel there is a lack of peripheral libraries to make my coding easy.
Hi, I personally don’t have too much experience with PIC but I feel cortex arm M3 M4 worth you to learn. With the help of ST library, coding should be easy since you had micro controller experience before. Besides, there are lots of tutorial online for you to make reference with, that’s how I learned STM32.