
The 31st APEC Micromouse Competition was held on March 27th, 2017 at Tampa Convention Center, Tampa, USA.
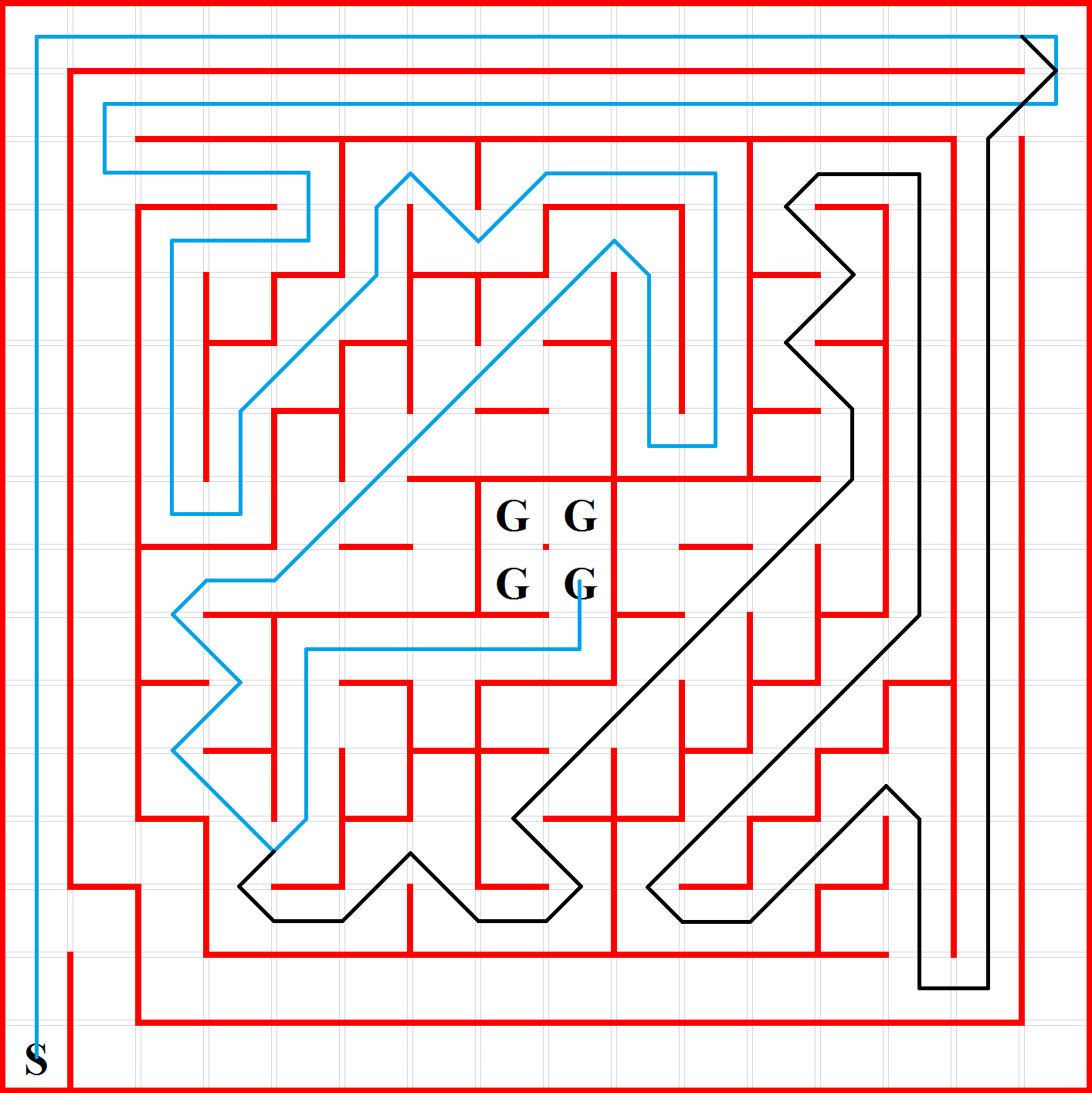
There a typically 2 paths for this maze, marked in blue and black, where the blue one has 108 cells and the black one has 110 cells
Here is the status analysis for these 2 paths:
according to my statistics, the blue path has less cells than the black path. Besides, the blue path has much shorter overall distance list below. There is no doubt that the blue path is faster than the black one as long as the robot’s straight speed isn’t unreasonably slow for a speed run.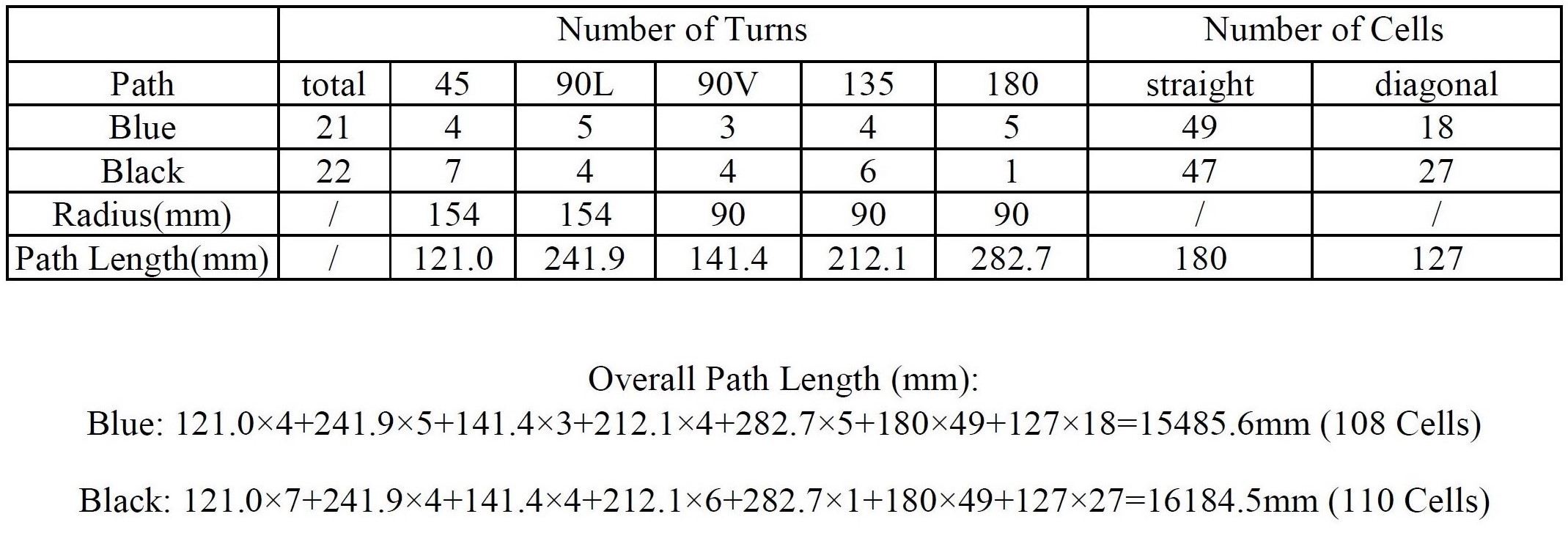
However, the mice Diu-Gow, Exia Repair II and Decimus 5a chose the black path. Interestingly, Diu-Gow also won the fastest run award, even though the path is not preferred based on my analysis.
As of the optimal search strategy:
If the mouse uses straight orientated priority floodfill, the mouse will have to make a whole circle around the maze in order enter the inner circle of the maze. Therefore diagonal oriented floodfill is the best option to make a more efficient search since it will make a right turn at the first adjacent during the depart run of search. You will have a better sense once you see the video I publish on my later post.
However, the optimal return search strategy should be the straight oriented floodfill since there are some straight path on the way back that are unexplored. This is very important if you are trying to have the mouse accelerate on a unknown straight path during the search in order to reduce the overall search time to benefit your best score.
Only Diu-Gow, Decimus 5a and my mouse Green Giant 5.19V made the right turn at the first adjacent cell during the departing search, but the remaining search pattern aren’t exactly same since we all have our own preferences. As a result, my mouse did the fastest search amount all mice, and the maze time for first speed run was 9 second faster than the one who did the second fastest search(Diu-Gow), which gave me 9s/30=0.3s advantage on the upcoming first speed run. Unfortunately, my mouse crashed on the following speed run.
================================================================
Here are the detailed scores for all entries:

Click the image above to get a more detailed view.
As illustrated by the rules, the top 3 places are determined by ‘Best Score’ instead of ‘Fastest Run’.
Best Score is the current speed run(Fastest Run) time + Maze Time/30. For more detail, please refer to the official rules linked here: Link
==================================================================
Here are the links for Program , a brief introduction for each mouse at APEC 2017, and the report completed by Mr David Otten after the event.
APEC 2017 Report (By David Otten)

{kind=link}
Hello
The reason for choosing the black path is that Exia creates a path considering acceleration.
In the black path, the part that turns is dense, so the acceleratable distance is longer than the blue path.
9 more diagonal cells trade with 2 straight cell is still not worth the choice for the black path. Besides, Hippo C who chose blue path was faster than Diu-Gow 4 on their 1st speed run based from my analysis of 240 fps camera footage. I think the designer was intended to make the black path faster but did take into consideration of actual performance of a fan mouse. Although the black path has more continuous diagonal straight path, but the over length is significantly longer.
Such choices will also depend upon the tradeoff between acceleration, top speed and turn speed for the mouse as well as factors like the time taken at turn speed (if any) while hunting for the edge or taking up the slip offset for that speed. Small changes to my parameters cause the mouse to choose different paths in this maze.
that’s why I was dreamed to make a perfect speed run path generator!
Pingback: 2017 APEC Micromouse Competition Videos / Performance Brief | Updating… | Micromouse USA
Pingback: APEC 2017 - 31st Annual Micromouse Contest - Micromouse Online